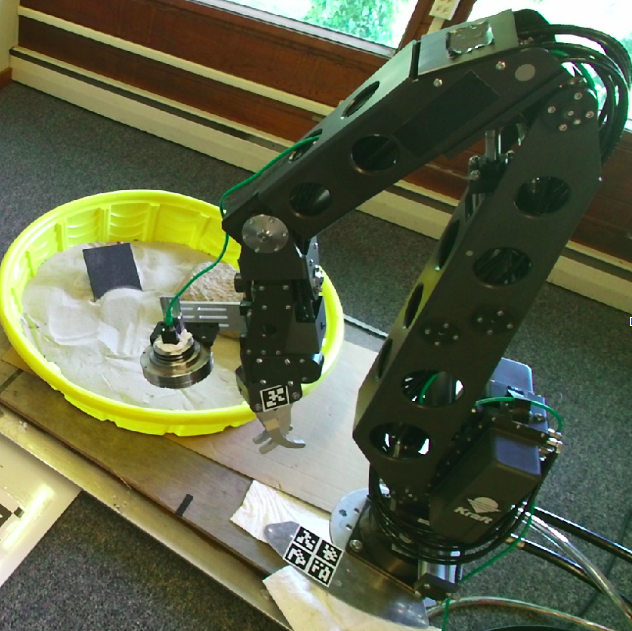
During my semester abroad with SEA, taking the class “Directed Oceanographic Research” gave me the opportunity to complete a research project and communicate my results in a technical write-up. One of my primary motivations when studying with SEA was to learn more about the role robots played in the ocean...
[Read More]