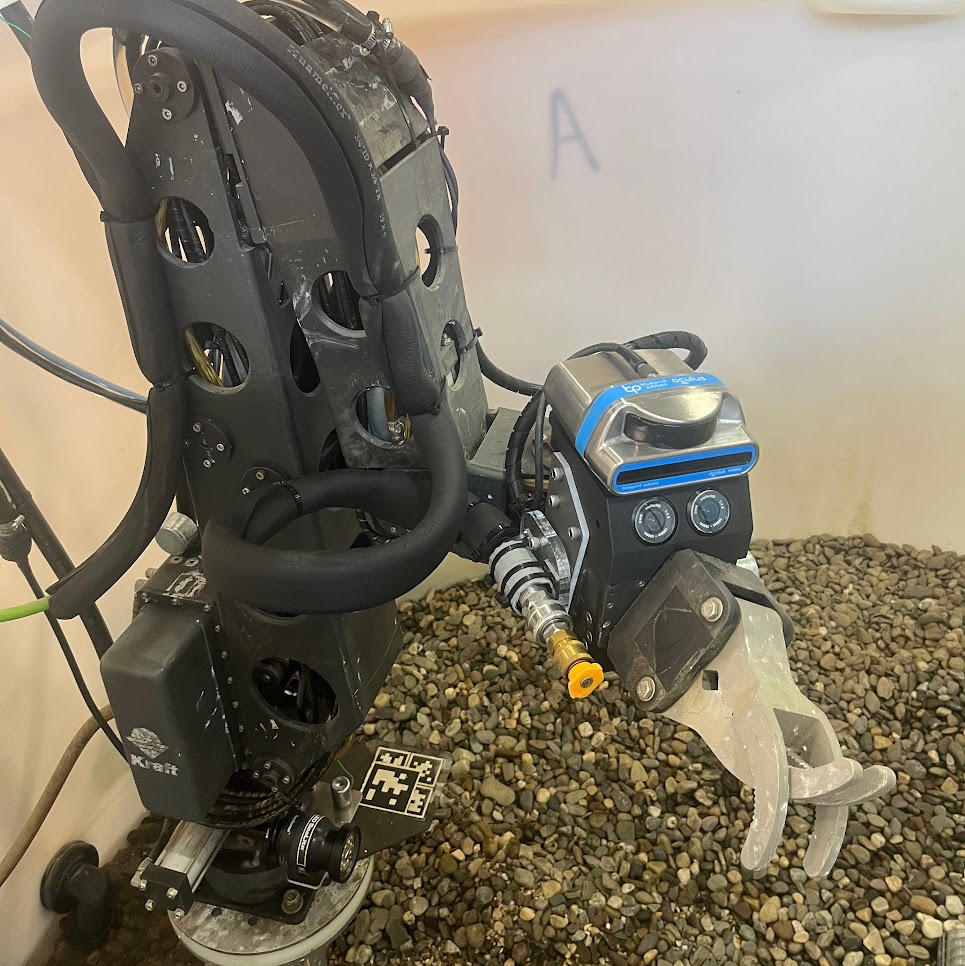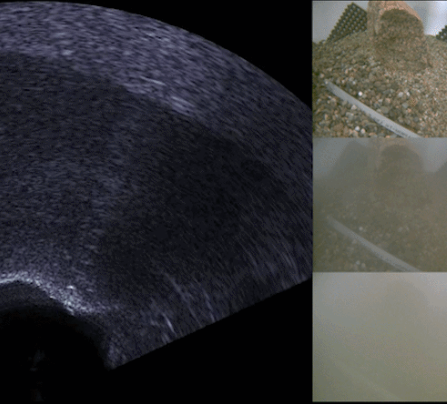
Existing perception systems used during intervention operations rely on data from optical cameras, which limits capabilities in poor visibility or lighting conditions. In this work, we propose the opti-acoustic fusion method Sonar-MASt3R, which uses MASt3R to extract dense correspondences from optical camera data in real-time and pairs it with geometric...
[Read More]