My friends and I wanted to learn more about SLAM, so we thought it’d be a good idea to use the final project in our Software Design class to get a headstart in learning about what goes into this complex problem. We first used the ROS package hector_slam to get an idea of what a complete implementation would look like. After getting this up and running on the TurtleBot, we decided to focus on the map navigation component of SLAM since that fit within the scope of this class.
We first used the ROS package gmapping to generate a map, then we used our ROS package based on nav2D to find a path from the specified starting position to end goal on the map.
For more information, I’d recommend checking out our project website!
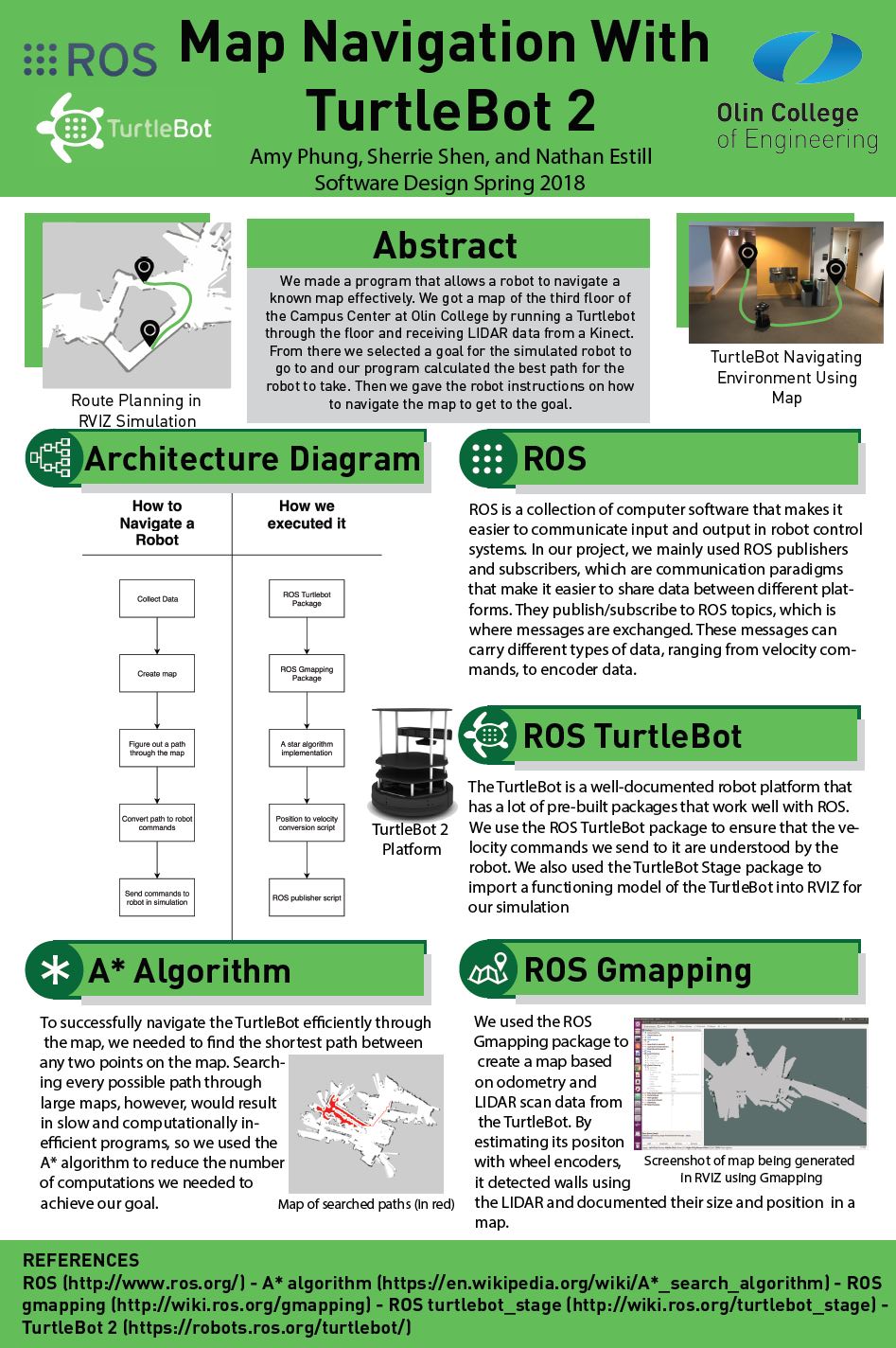
Project Poster