Robotics System Design
As mentioned in the abstract of this project this project seeks to build a robotic fish with a range of capabilities. It was important to us that the fish lended itself to future applications in swarms and self contained/autonomous operation.
As noted earlier this fish is closely based off of MIT’s Sofi [1]. We have designed our fish such that it is a ½ scale version of Sofi. The choice to do this is based on Sofi’s success and our hope to make use of existing work to streamline our design.
Distinctions
Seeing as we are operating with fewer resources than the Sofi researchers we have made several design changes. These key differences are captured here:
- Single centrifugal pump/rotating valve as opposed to a gear pump
- No fins/depth control (fixed depth surface fish)
- No acoustic underwater control
- Tethered Power instead of batteries
- ½ scale
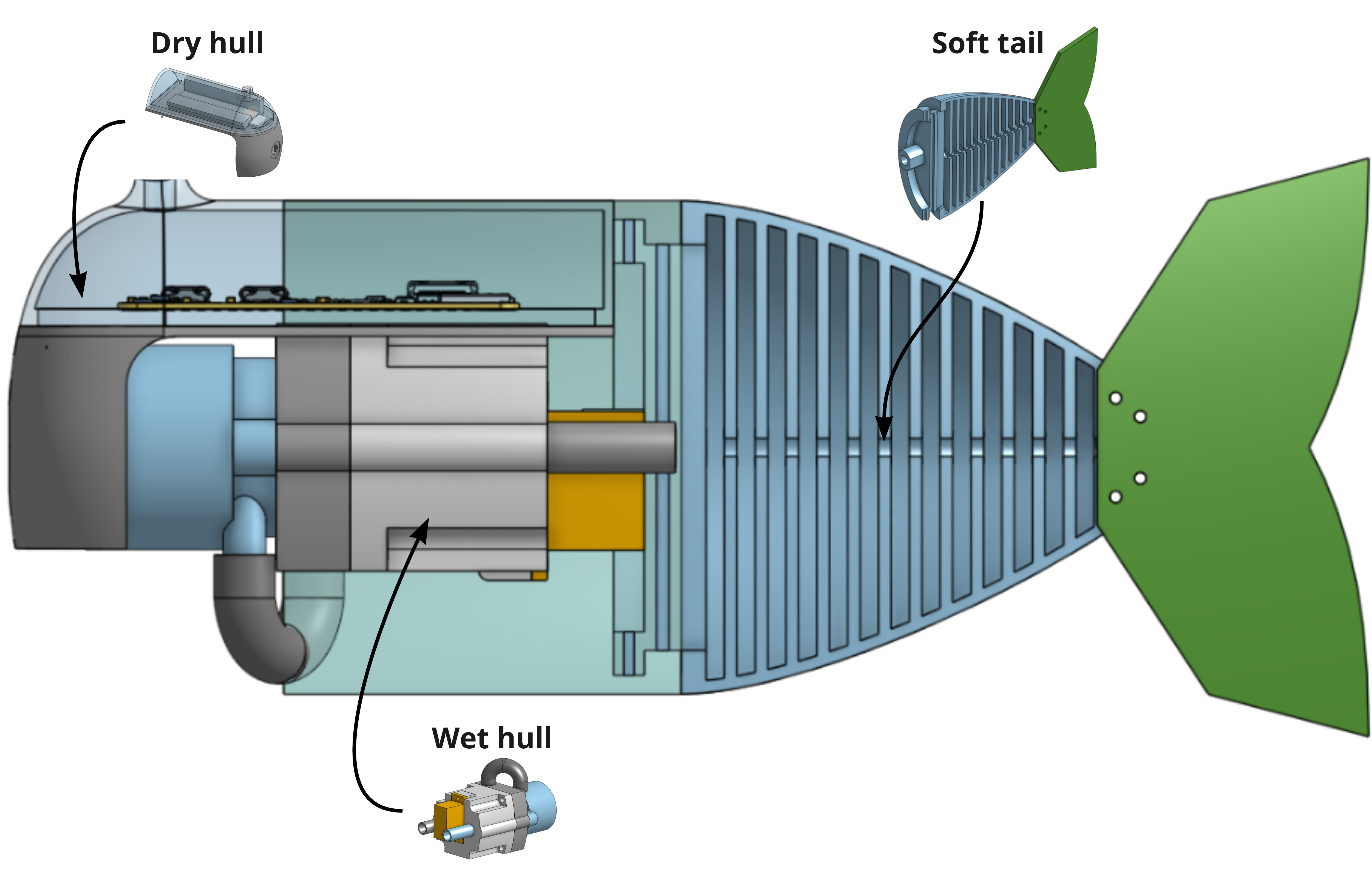
Our System and Subsystems
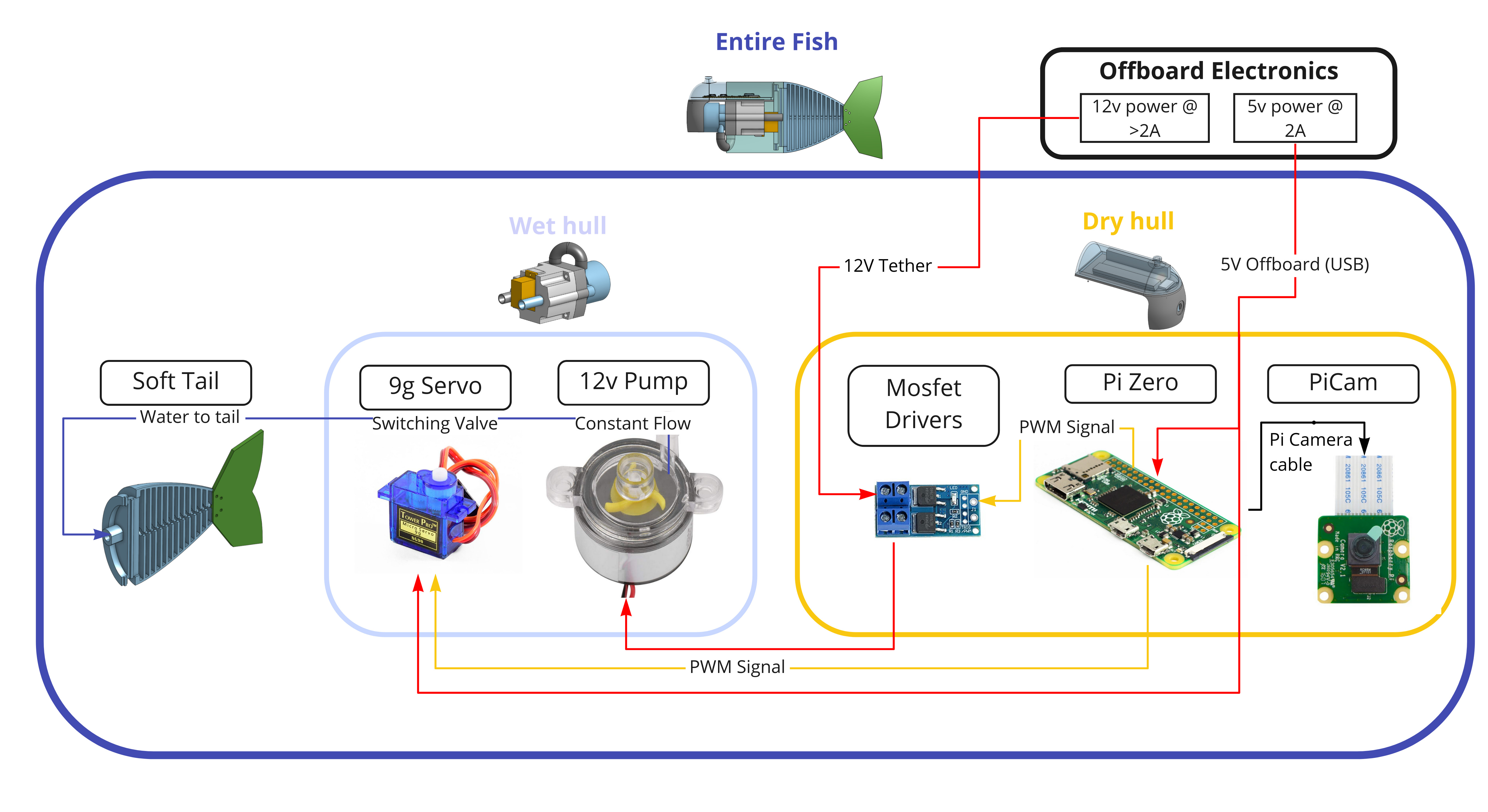
The fish is split into three subsystems as such: Soft Tail subsystem, Actuation/Pump subsystem, Software/Electronics subsystem
Fish CAD